Guida al centraggio e all'allineamento laser PhotoRobot
Questo manuale di supporto per l'utente fornisce istruzioni tecniche su come allineare e centrare i sistemi laser a croce integrati PhotoRobot. Segui questi passaggi per trovare il punto medio di qualsiasi lastra PhotoRobot rotonda utilizzando due laser. Le istruzioni includono come spostare fisicamente i laser al centro del tavolo, le impostazioni iniziali del laser e come mettere a punto il posizionamento del laser. Inoltre, alla fine del manuale, sono presenti le istruzioni per l'allineamento e il centraggio dello speciale sistema laser del giradischi C1300 (precedentemente distribuito con il nome di Case 1300).
Importante: Prima di qualsiasi autoinstallazione o assistenza, fare sempre riferimento alle informazioni e alle istruzioni sulla sicurezza di PhotoRobot, oltre al manuale fornito specificamente con il dispositivo.
Nota: Fare riferimento a PhotoRobot First Use & Basic Testing per informazioni dettagliate sulla configurazione di rete e sui requisiti di rete.
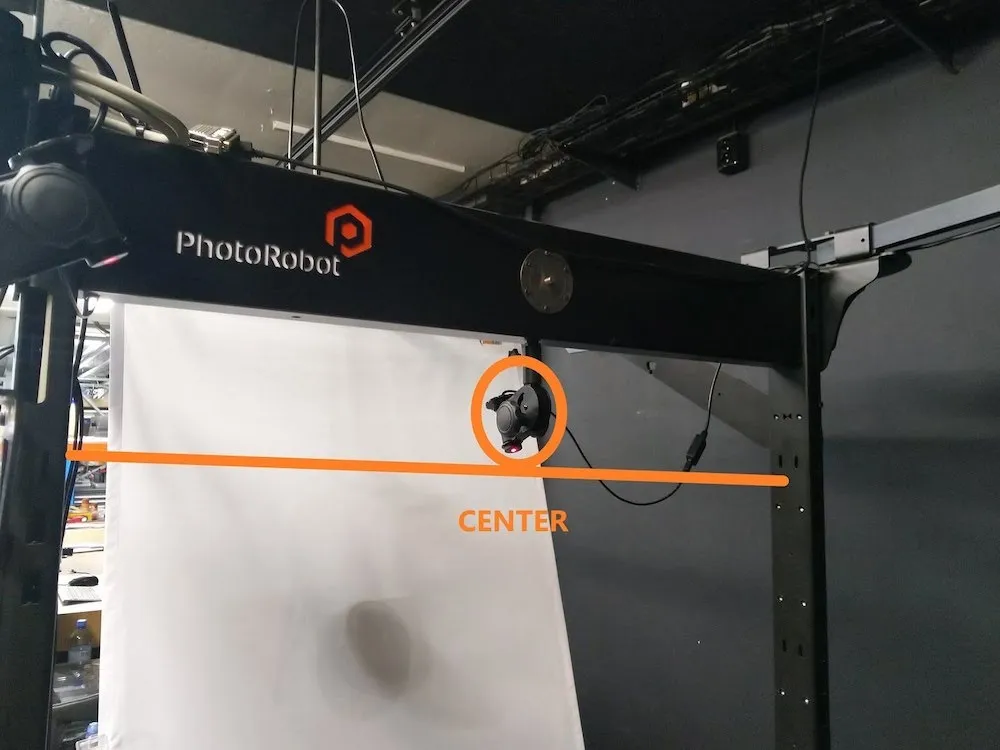
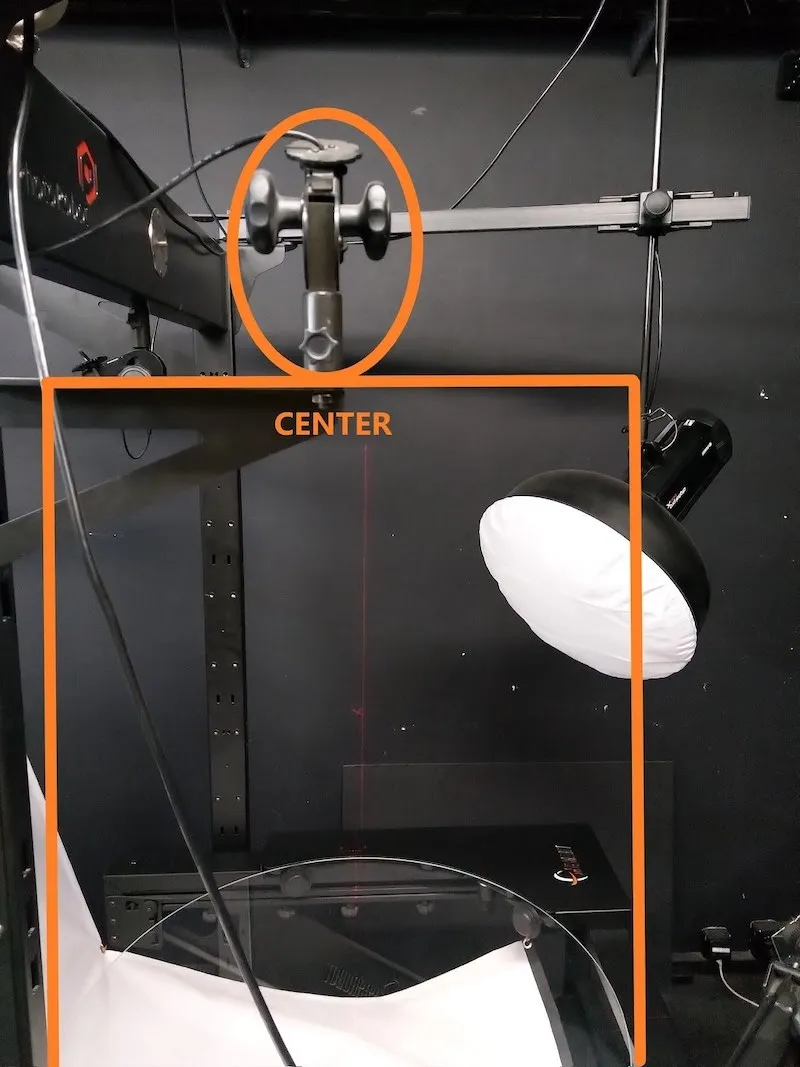
1. Sposta fisicamente i laser al centro del tavolo
1.1. Prima di iniziare, stabilire una connessione tra PhotoRobot e la rete locale. Successivamente, accendi l'unità di controllo (6a generazione) e una scatola laser.
Nota: Per allineare e centrare il sistema laser per il giradischi C1300, fare riferimento anche alle istruzioni speciali nella sezione 4 di questo manuale utente.
1.2. Dopo aver collegato PhotoRobot alla rete e aver acceso l'unità di controllo e la scatola laser, misurare la distanza tra i due lati del tavolo in cui è montato il laser. Quindi, ruotare o spostare manualmente il laser al centro e fissarlo in posizione.
2. Stima delle impostazioni approssimative
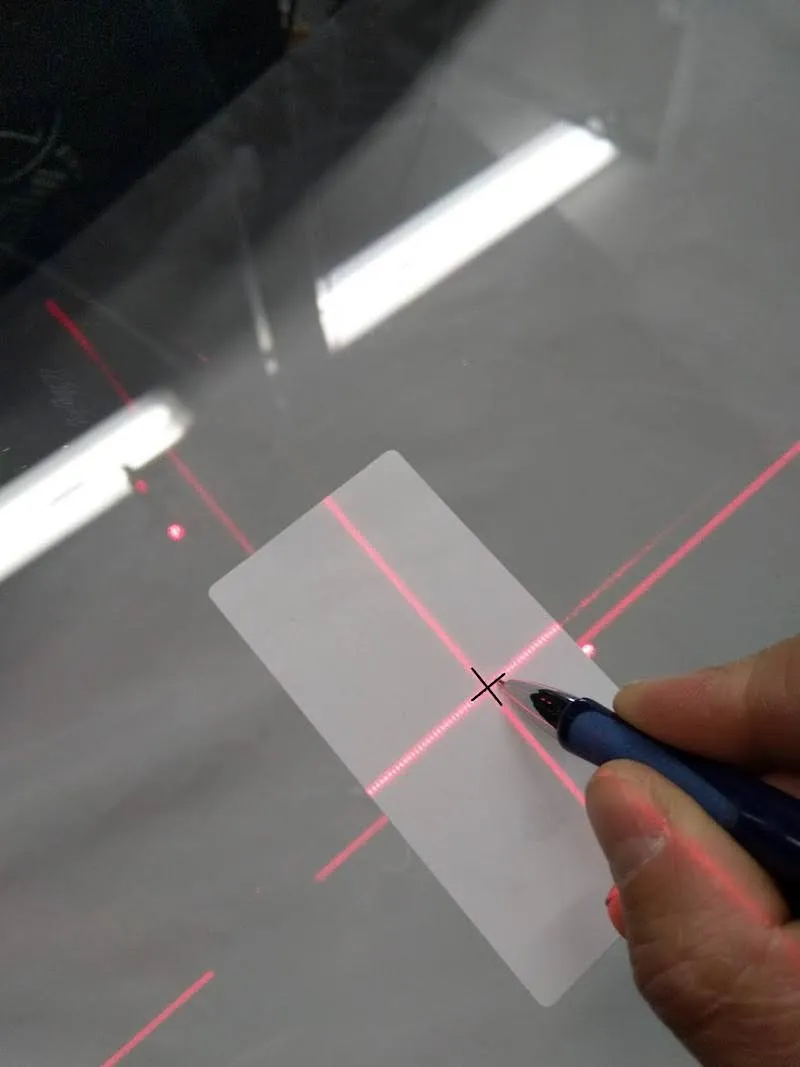
2.1. Quando il laser è fissato in posizione, posizionare un adesivo sulla piastra del giradischi approssimativamente a metà del vetro. I laser diventeranno più visibili sull'adesivo, aiutando a stimare meglio il punto centrale della targa.
2.2. Regolare entrambi i laser a mano per allinearli sull'adesivo che stima il punto medio approssimativo.
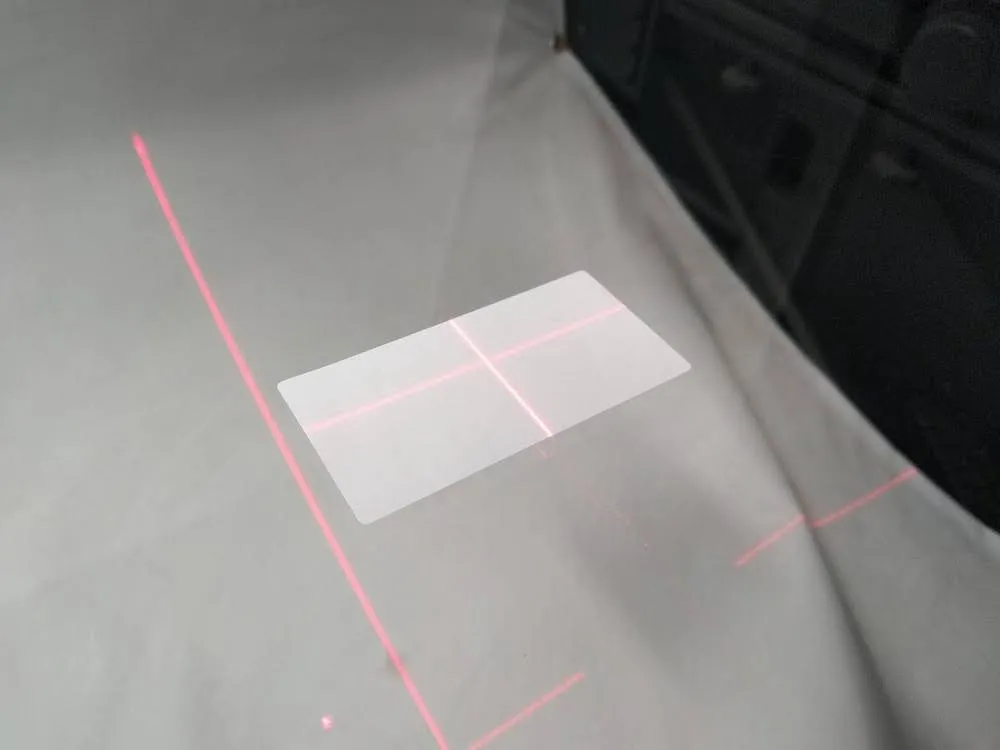
3. Regola l'allineamento del laser
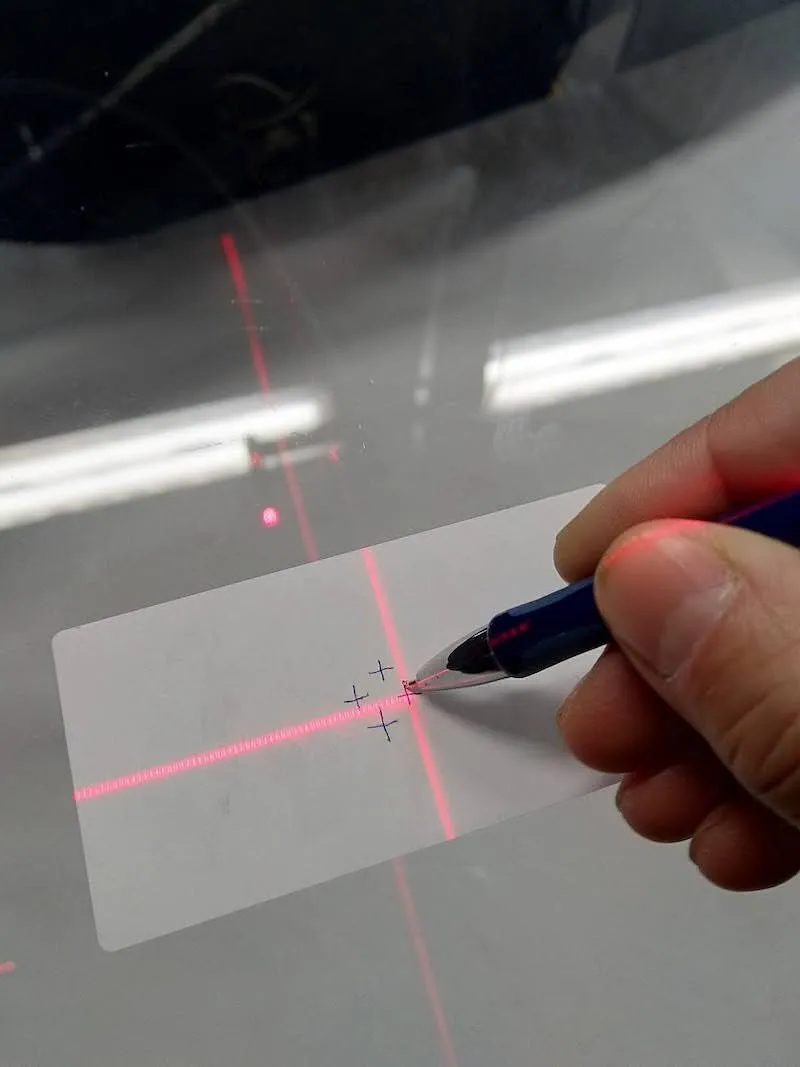
3.1. Traccia una piccola croce sull'adesivo copiando la croce rossa dei laser.
3.2. Successivamente, avvia l'applicazione Locator sul tuo cellulare, trova l'unità di controllo assegnata al robot e accedi alla GUI del servizio. Nota: Per istruzioni dettagliate sulla rete, fare riferimento ai prerequisiti dettagliati della rete di PhotoRobot (sezione 8: Informazioni sull'appendice). Quindi, trova l'unità di controllo assegnata al robot e accedi alla sua GUI.

3.3. Nella GUI di servizio, utilizzare i controlli di rotazione per ruotare il vetro di 90 gradi e tracciare nuovamente la posizione dei laser a croce sull'adesivo. Ripeti questo passaggio due volte: ruotando il vetro di 90 gradi, tracciando la croce laser, ruotando di 90 gradi e tracciando la croce laser un'ultima volta.
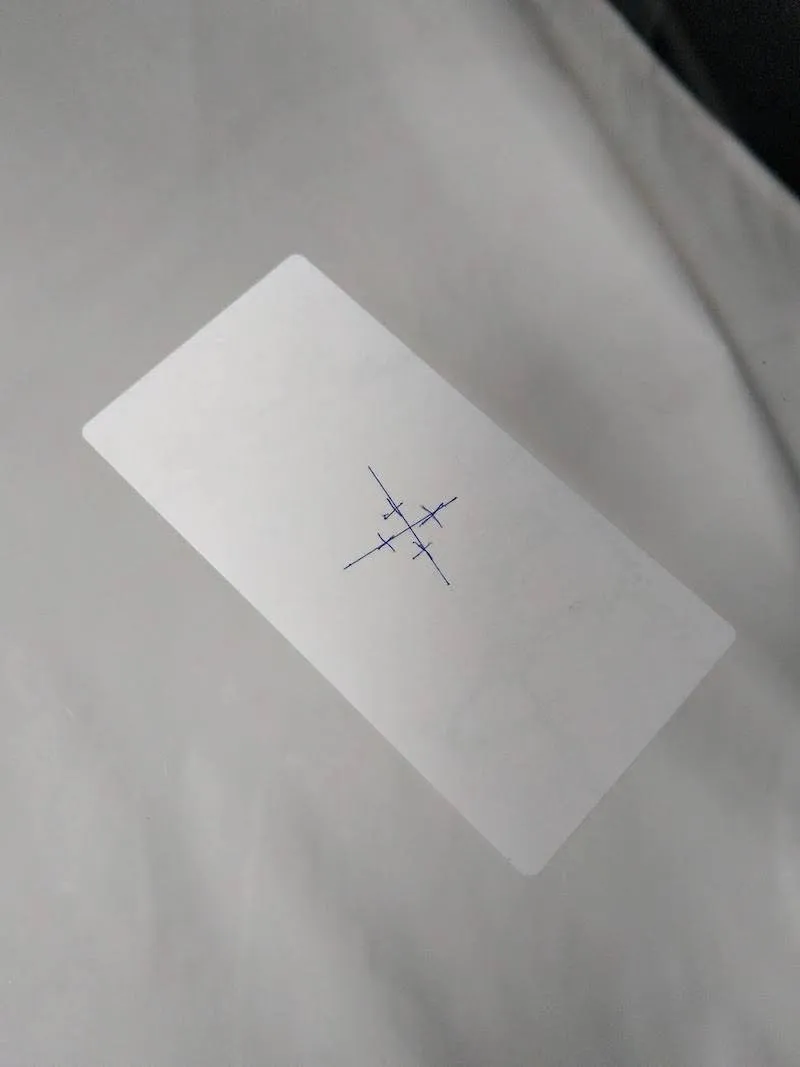
3.4. Dopo aver tracciato le quattro croci sull'adesivo, collegare ciascuna croce opposta con linee rette. La croce risultante tra le singole croci rappresenterà il punto medio effettivo della lastra di vetro.
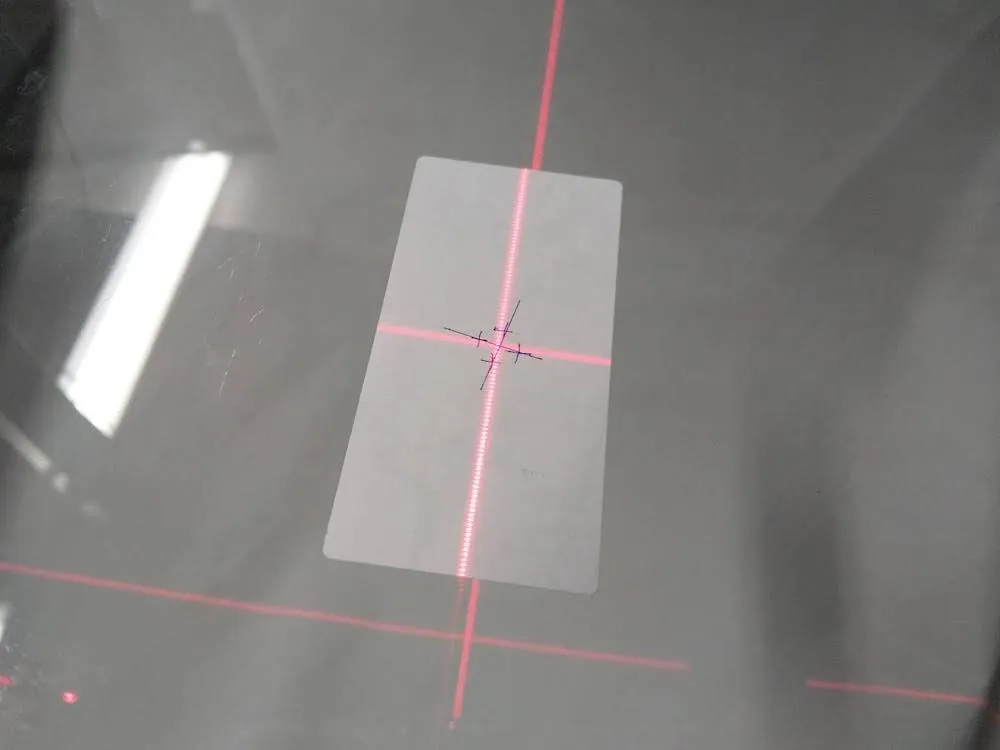
3.5. Infine, regolare entrambi i laser sul punto medio identificato. Il sistema laser sarà ora centrato e allineato al centro assoluto di rotazione della lastra.
4. Allineamento e centraggio dei laser speciali C1300
4.1. Quando si allineano e si centrano i laser sul robot C1300, notare il sistema laser speciale. Il sistema laser C1300 presenta diverse differenze rispetto ad altri PhotoRobot. Sebbene i principi fisici siano gli stessi, la costruzione del sistema laser C1300 prevede un'installazione di quattro laser.
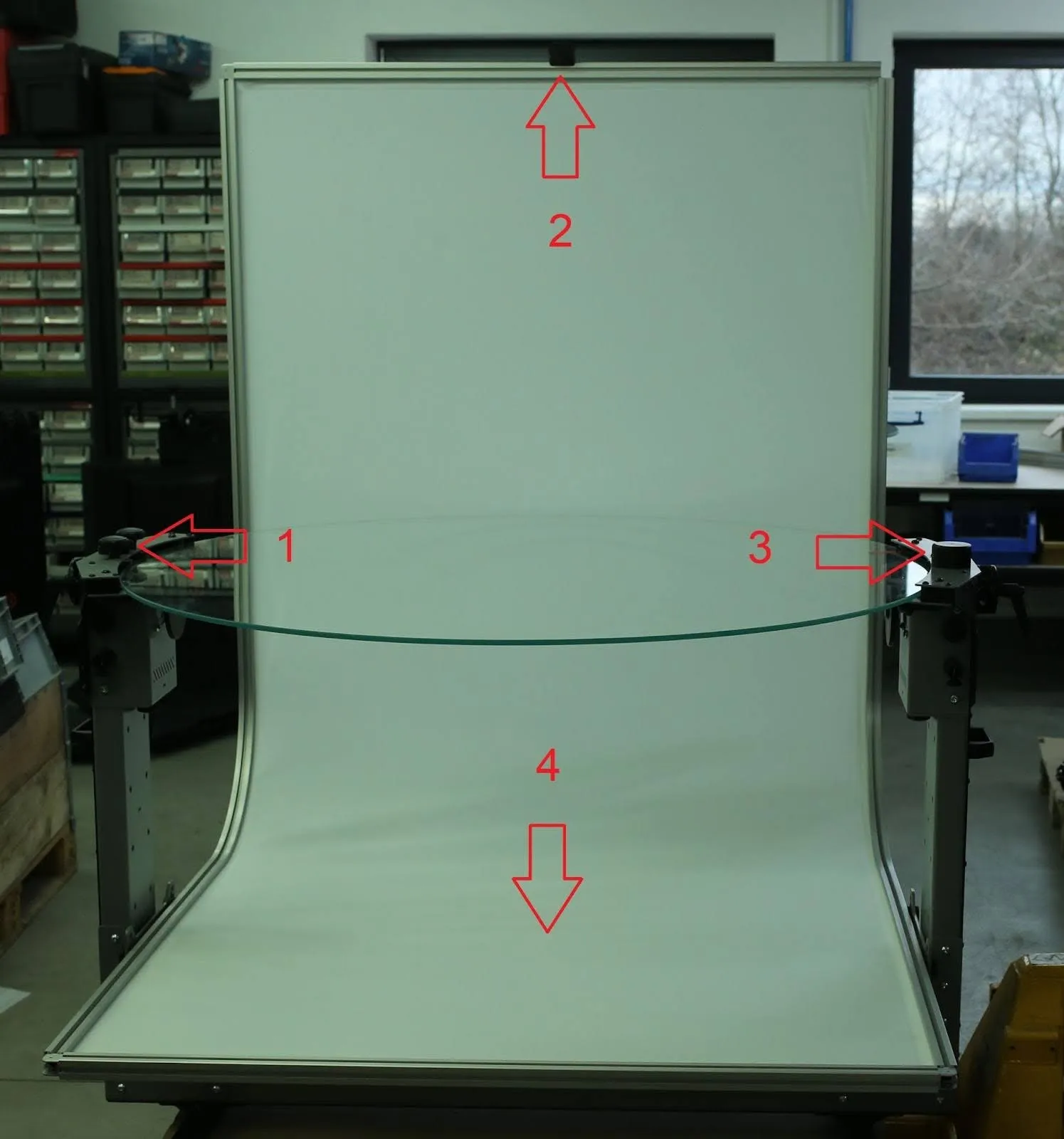
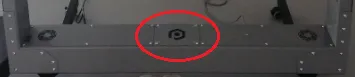
4.2. In questo sistema, il laser 4 è parte integrante dello scheletro del robot C1300. Laser 4 è un laser a croce e brilla attraverso lo sfondo bianco dal lato inferiore. Per regolare la posizione del laser, trova le quattro viti argentate per scoprire la parte quadrata centrale che ospita il laser.
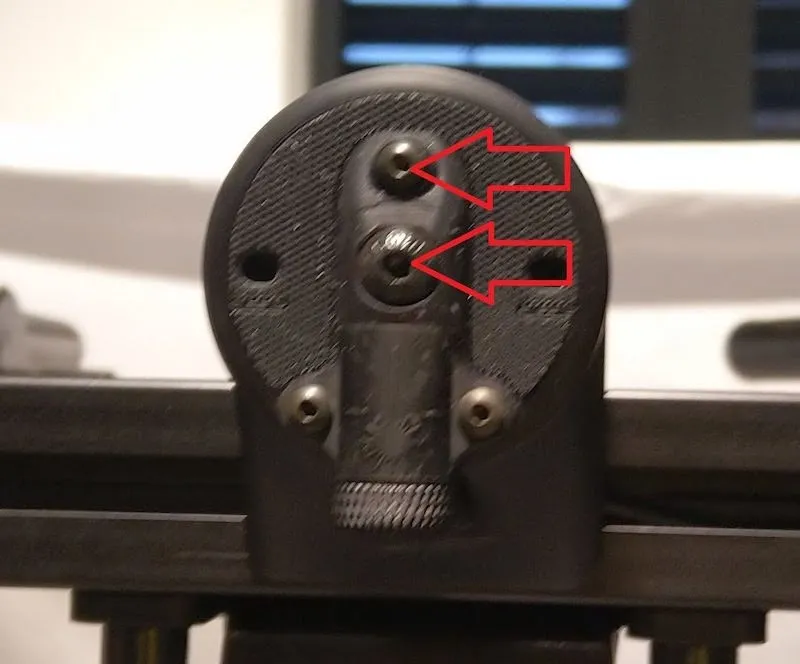
4.3. Dopo aver scoperto l'alloggiamento della parte quadrata centrale Laser 4, utilizzare le due viti che fissano l'alloggiamento del laser in plastica per regolarne manualmente la posizione.
Nota: Laser 1, Laser 2 e Laser 3 hanno tutti la stessa struttura del Laser 4. Sono anche tutti laser a linea:


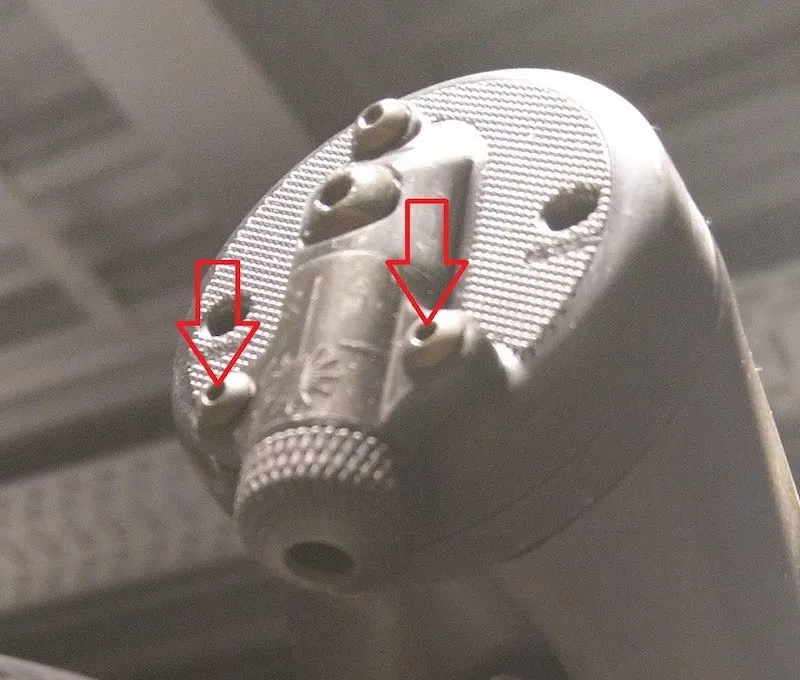

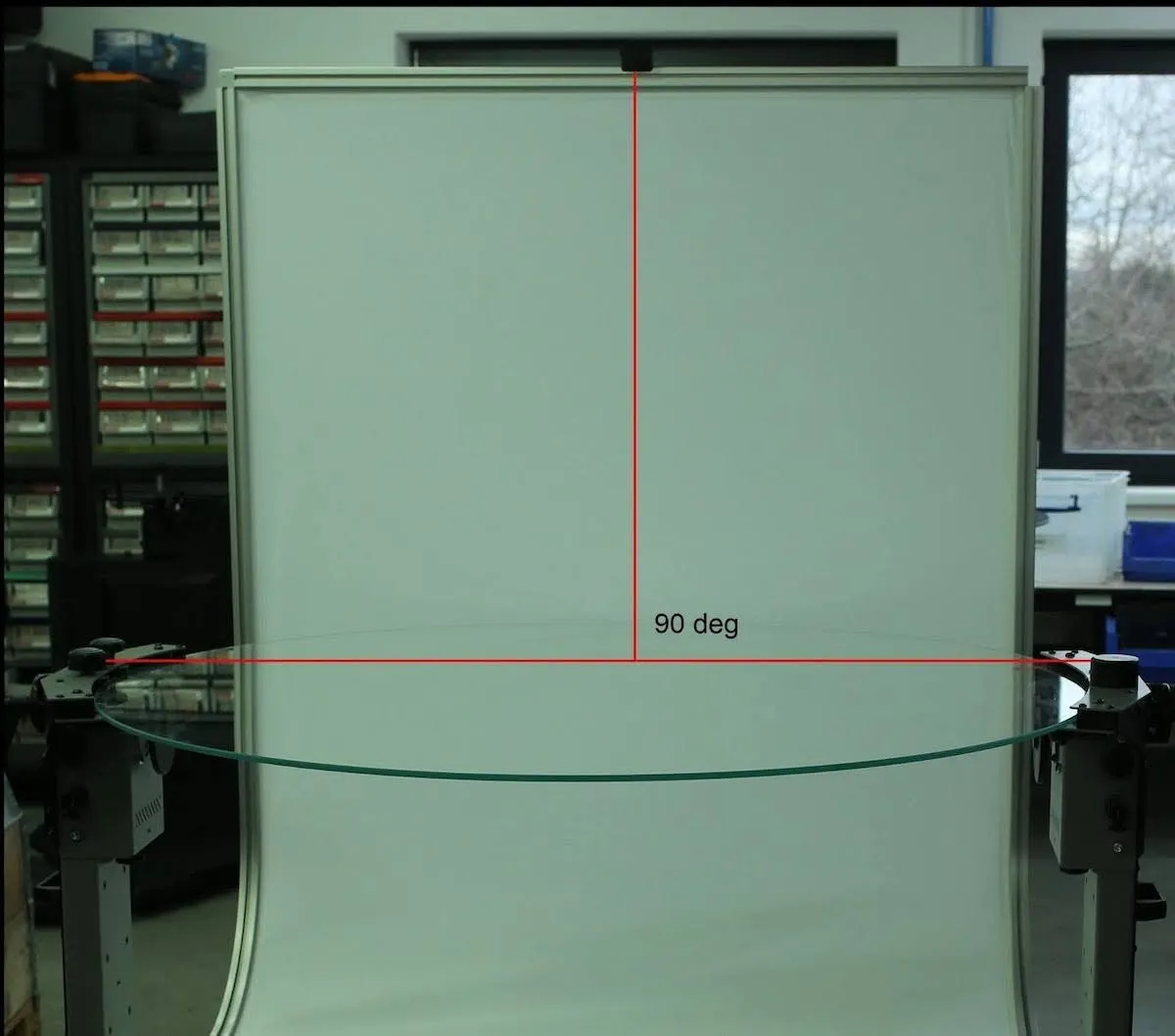
4.4. Infine, quando si allineano e si centrano i laser, assicurarsi che vi sia un angolo di 90 gradi tra la linea laser dal laser superiore e la lastra di vetro.


Serie EOS Rebel


Serie EOS DSLR


Serie mirrorless EOS M


Serie PowerShot


Primo piano / Palmare

La serie Canon EOS Rebel offre fotocamere reflex digitali adatte ai principianti con una solida qualità dell'immagine, controlli intuitivi e funzioni versatili. Ideali per gli appassionati di fotografia, queste fotocamere offrono una messa a fuoco automatica affidabile, touchscreen orientabili e registrazione video Full HD o 4K.
Connessione
Risoluzione (MP)
Risoluzione
La serie di reflex digitali Canon EOS offre immagini di alta qualità, messa a fuoco automatica veloce e versatilità, che la rendono ideale sia per la fotografia che per la produzione video.
Connessione
Risoluzione (MP)
Risoluzione
La serie mirrorless Canon EOS M combina un design compatto con prestazioni simili a quelle di una reflex digitale. Dotate di obiettivi intercambiabili, messa a fuoco automatica veloce e sensori di immagine di alta qualità, queste fotocamere sono ideali per i viaggiatori e i creatori di contenuti che cercano la portabilità senza sacrificare la qualità dell'immagine.
Connessione
Risoluzione (MP)
Risoluzione
La serie Canon PowerShot offre fotocamere compatte e facili da usare per i fotografi occasionali e gli appassionati. Con modelli che vanno dalle semplici compatte alle fotocamere con zoom avanzate, offrono praticità, qualità dell'immagine solida e funzionalità come la stabilizzazione dell'immagine e i video 4K.
Connessione
Risoluzione (MP)
Risoluzione
Le fotocamere portatili e ravvicinate Canon sono progettate per fotografie e video dettagliati e ravvicinati. Compatti e facili da usare, offrono una messa a fuoco precisa, immagini ad alta risoluzione e funzionalità macro versatili, perfette per vlogging, fotografia di prodotti e primi piani creativi.


